A NAR L3 Certification Rocket
Copyright © 2008 Bdale Garbee
This document is released under the terms of the Creative Commons ShareAlike 3.0 license.
| Revision History | |
|---|---|
| Revision 1.2 | 12 January 2009 |
| Document firmware bug in miniRRC2 and possible impact on flight. | |
| Revision 1.1 | 5 December 2008 |
| Remove embedded images in favor of references to gallery.gag.com | |
| Revision 1.0 | 28 October 2008 |
| Recording results of first, and only, flight attempt. | |
| Revision 0.5 | 27 September 2008 |
| Building checklists | |
| Revision 0.4 | 17 September 2008 |
| Documenting the build process as it happens | |
| Revision 0.3 | 29 March 2008 |
| Incorporate ideas from James Russell during initial L3CC review | |
| Revision 0.2 | 27 March 2008 |
| Cleaned up for initial review | |
| Revision 0.1 | 16 March 2008 |
| Initial content | |
Table of Contents
Please note that I stopped adding photos to this document at some point. I have many more photos of the YikStik build, but haven't decided how best to present them yet... update coming someday!
Table of Contents
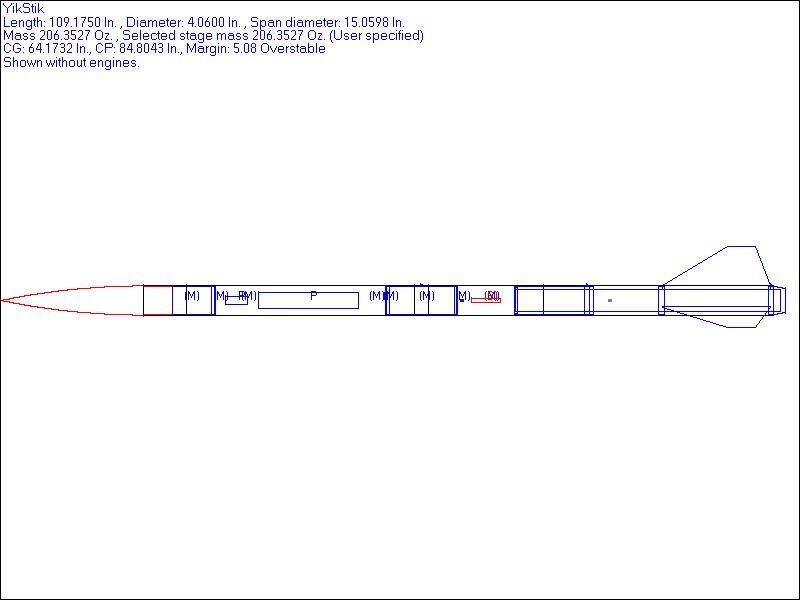
This is the rocket I'm designing for my NAR Level 3 certification flight. The general idea is to build a fairly cheap rocket capable of reliably flying this year's Aerotech level 3 special, which is an M1297W reload. I'd like to be able to fly the prototype of my own altimeter design, and to be able to fly it often on smaller / cheaper reloads at launch sites with modest waivers like Hudson Ranch.
I want to experiment with vacuum bagging carbon fiber reinforcements, and intend to use my CNC milling machine to cut all the centering rings, etc. The new Giant Leap "Dynawind" tubing feels like a good choice, and if we stick to the 4 inch version we can use a cheap plastic nosecone to keep the cost down.
Preliminary analysis suggests that a roughly 8 foot rocket made from 4 inch airframe with a 75mm mount and three fins should fly to something around 14k feet on the M1297W, could break three miles on the M1850W, and yet could safely fly on reloads as small as a J for economical fun. Those altitudes mean the certification flight will need to be at a site with a high-altitude waiver like the NCR north site.
I've always thought the high-gloss red paint job on one of my son's rockets when out on a launch rod in the sun looks a lot like glistening wet lipstick.
Combine that with the fact that my wife who isn't fond of the stuff refers to lipstick as "yik stick"... and the rest should be obvious.
My planned paint scheme is a bright red nosecone, gold tube, and black fin can, which is the mental image I have of what lipstick applicators look like, most likely from a stick my mother or one of my grandmothers had when I was a child.
Table of Contents
YikStik is a fairly simple "three fins and a nose cone" dual-deploy rocket using a 75mm motor mount, 4 inch glass-wrapped phenolic airframe with zipperless fin can, plastic nose cone, plywood fins, and lots of glass and carbon fiber reinforcing. The primary electronics bay will be designed to hold two altimeters, and a distinct payload bay may carry an experimental altimeter, GPS receiver, and downlink transmitter.
I intend to cut the airframe components from two 48 inch lengths of 98mm Giant Leap Dynawind tubing. The 30 inch main bay and 18 inch drogue bay will be cut from one length, while the 33 inches of fin can, 2 inches of electronics bay, and 8 inches of payload bay will be cut from the second.
The fins are designed from scratch, and I intend to build them up from two layers of 1/8 inch birch plywood, three layers of carbon fiber, and two layers of 6 oz glass. The stack will be glass, carbon fiber, plywood, carbon fiber, plywood, carbon fiber, glass. The edges of the plywood will be routed to give a modified airfoil shape to the finished fins. The stack will be laminated using West Systems epoxy products and vacuum bagged. The shape is a compromise between mass, surviving Mach-transition stress, optimal stability margin, and avoiding damage during handling and on contact with the ground during recovery.
The fins will be locked in to milled slots in two of the centering rings, and will be epoxied to the motor mount with glass reinforcing tape. The airframe will be slotted to allow the completed motor mount / fin assembly to be inserted from the rear, with fillets of epoxy applied inside and outside the airframe after insertion.
All centering rings and bulkheads will be custom machined from 3/8 inch birch plywood using my 3-axis CNC milling machine. Some rings will use laminated pairs of 3/4 inch total thickness to enable use of threaded inserts for 1/4-20 rail button screws or deep routing for fin alignment slots.
I will embed three 8-24 T-nuts in the aft centering ring spaced to allow the use of home-made Kaplow clips to retain 75mm motors. The same holes may be used to attach custom motor mount adapters for smaller diameter motors.
The recovery system will feature dual redundant barometric altimeters in an electronics bay similar to the LOC design located between the drogue and main parachute bays.
A PerfectFlite MAWD will be flown as the primary altimeter and to record the flight altitude profile. A MissileWorks Mini-RRC2 will fly as backup altimeter and to directly capture max velocity.
Each altimeter will have a separate battery and power switch. A 4PDT slide switch will be used as a SAFE/ARM switch configured to interrupt connectivity to the ejection charges.
I hope to fly my own altimeter design as a payload in a short payload section just behind the nose cone. I have acquired the pieces to add a GPS receiver and RF downlink using ham radio frequencies to the payload to track the rocket's position during flight. This is not essential to fly, but could make recovery simpler and would just be fun to fly if I can get it all working and suitably ground and/or flight tested in time.
This design has been thoroughly analyzed using RockSim with motors ranging from the Cesaroni J285 through the Aerotech M1850W and appears to be unconditionally stable across that range. The lowest margin is around 1.2 seen with the M1297W planned for my level 3 certification flight, albeit with many masses still only roughly estimated.
These simulations will be refined as the build proceeds and as-built stability verified before flight.
The Aerotech M1297W reload should carry this vehicle without ballast to just over 14 thousand feet AGL. It should make over 16 thousand feet AGL on an M1850W, and should fly stably to roughly 2.5k feet AGL on a Cesaroni J285.
Hitting optimal mass on the largest motors may require ballast, depending on final build weight. My plan is to fly without ballast on the certification flight, trading some altitude for a slower and softer recovery. If the cert succeeds, then I might try an optimal mass flight sometime later on an M1850W or equivalent "bigger M" reload to join the "three mile club".
The recovery system will use dual redundant barometric altimeters firing black powder charges. At apogee, a drogue chute will deploy from just forward of the fin can, with size selected for an approximately 100 ft/sec descent rate. At a preset altitude, a main chute will be deployed to achieve recovery of the bulk of the rocket at under 20 ft/sec. The main chute will be packed in a deployment bag, configured as a "freebag" and pulled out of the airframe by a second drogue chute. This drogue will recover the nosecone and deployment bag separately from the remainder of the rocket which will recover under the main.
I intend to sew the parachutes from scratch using a design documented by Team Vatsaas using 1.9oz rip-stop nylon and 550 lb parachute cord. If time runs short, equivalent chutes from SkyAngle, Rocketman, or Giant Leap could be substituted (at significantly higher cost).
The deployment bag will probably be purchased from Giant Leap. The recovery harness will probably use tubular kevlar, also from Giant Leap.
The recovery system attachment points will all use 1/4 inch u-bolts with nuts, washers, and backing plates through bulkheads except for the fin can. The fin can has insufficient room between the motor mount and the airframe inner wall for nuts and washers, so an alternative means of recovery system attachment is required. The fin can will be equipped with either a 3/16 inch stainless steel aircraft cable loop, or a loop of 1/2 inch tubular kevlar, bonded to the motor mount. If available, a screw-eye attached to the forward motor closure may be used instead of or in addition to this recovery attachment loop.
Table of Contents
I have collected all of my build photos in one place, they may show better than I can explain how various aspects of YikStik went together.
The tubing for the airframe, couplers, and motor mount was all cut using a carefully aligned and adjusted power mitre saw, and the ends lightly sanded to remove rough spots. The main and drogue bays were cut from one 48 inch length of Giant Leap 98mm Dynawind tubing, the fin can, electronics bay, and payload bay were cut from the second. The three couplers for the fin can, electronics bay, and payload bay were cut from Giant Leap 98mm phenolic coupler stock. And the motor mount was cut from Giant Leap 75mm phenolic airframe stock. Note that the motor mount is the longest piece because of the zipperless design with full-length motor mount.
The airframe tubing selected includes a wrap of 10oz glass in epoxy over the base phenolic tubing (visible in some photos as a shine on the outside of the tubing), but the coupler stock is unreinforced. To ensure the couplers can handle the anticipated loading, I reinforced each with one layer of interior carbon fiber, using the "kitchen vacuum bagging" technique documented by John Coker.
This was my first hands-on experience working with carbon fiber. The end of the coupler nearest the unit during bagging experienced some crushing of the fibers right at the end. It doesn't matter for this project because each of the couplers will have at least one end fitted with a bulkhead or centering ring, but in the future I'll be tempted to cut the coupler stock a bit long before bagging and trim to length after reinforcing to get "perfect" ends. The technique worked marvelously otherwise, and the resulting couplers look and should work great!
Six pieces of 1/8 inch birch plywood were stacked, edge-aligned on what would be the fin root edge, and clamped. The outline of the fin design was marked in pencil, and three 1/8 inch holes drilled through the stack inside the fins to allow using 4-40 screws and nuts to hold the blanks together while making the initial cuts, so that they would all be matched in size. The clamps were removed to avoid interference during cutting. The fin outline was then cut using a radial arm saw.
A router table with 1/8 inch roundover bit was then used to round over the outer edge, 3 blanks on one side and three on the other. This edge might have been left square, but I prefer the look and feel of rounding. The router table with a 1/2 inch diameter straight cutting bit and a fin beveling jig was used to impart a 10-degree bevel on the leading and trailing edge of each fin blank, again 3 on one side and three on the other. The resulting 6 blanks thus form 3 pairs of fin components with a modified airfoil shape.
The fin assembly started with a simple lamination of two layers of ply sandwiching a layer of carbon fiber. Each fin used "one pump" of West Systems epoxy and the stack was vacuum bagged using the Foodsaver with wide bagging material. To keep everything flat while the epoxy cured, the stack of fins was sandwiched between two unused extra shelves for a storage cabinet I had on hand (particle board covered in laminate, very flat and smooth, nearly inflexible at this loading), and stacked with about 75 lbs of loose barbell weights.
On one of the three fins, the plywood layers are out of alignment by 1-2mm in the longest axis. The other two are nearly perfect. Light sanding should allow me to match them before laminating the outer layers of carbon fiber and glass.
After the fins cured, they were bulk sanded with medium and fine sandpaper and an electric palm sander. Final sanding of the leading and trailing edges was done using 400 grit paper on a flat surface, holding the fin the way you'd sharpen a knife against a stone. The results seem good, all three fins match pretty closely.
A fin holding jig was cut from 1/8" hardboard using my rotary tool with a fiber cutoff wheel. The fin slots were made to be a snug fit. A small batch of epoxy was used to apply a bead to the root edge and tab at the leading edge, then the fins were installed against the motor mount and locked into place with the jig to cure. The centering ring that locks the aft edge of the fins was dry-fit during this operation to ensure proper alignment, but was not glued yet. It will go on after the airframe and internal fin filets are installed.
The fins were reinforced with fiberglass and epoxy. Masking tape was used to carefully delineate where the airframe ID will be, then 6oz glass 14.25" by 3.5" was epoxied fin-fin across the MMT. Strips of 8.6oz "boat tape" fiberglass were worked into the joints with more epoxy, and a sheet of plastic covered by ziplog bags of water were used to hold things in place during the initial curing. The three sides were done one at a time and allowed to cure before proceeding. The results look good, and in combination with internal and external airframe filets should yield a super-strong fin can.
Pairs of 3/8 inch birch plywood blanks were laminated using Titebond wood glue and clamped while curing to form 3/4 inch blanks for centering rings. From a strength perspective, 3/8 inch should suffice, but there are two reasons for going with thicker blanks in some places. The first is that the rail buttons chosen use 1/4-20 mounting screws, and threaded inserts in that size are nearly 3/8 inch outside diameter (and thus would tear up a ring only 3/8 inch thick on insertion). The second is that I like to mill slots in the centering rings on each end of the fins to "lock" the fins into position. Doubling the blanks used to cut those rings will allow me to cut 1/4 inch deep fin slots and still have a half inch of unmolested wood in the rings for strength.
The aft centering ring and the one just aft of the zipperless coupler section were edge-drilled for the installation of brass 1/4-20 threaded inserts to hold rail buttons. The inserts were locked in place with epoxy, then ground down until nothing protruded beyond the OD of the ring.
The forward two centering rings were installed on the MMT using JB Weld high-temperature epoxy, and incorporating an aircraft cable loop for recovery system retention since there just wasn't room for u-bolts.
The ring at the leading edge of the fins was initially installed assuming the aft ring would be nearly flush with the rear of the MMT and equipped with Kaplow-clip style retainers, but before the fins were installed a Giant Leap Slimline Tailcone Retainer for 75mm motor in 98mm airframe became available thanks to Tim Thomas, and so this ring was cut out and replaced with another one inch farther forward to allow installation of the tailcone at the rear of the MMT. I really like the tailcone on my Vertical Assault kit, and think it'll work out to be a great addition for this rocket!
An alignment jig for the fins was carefully marked out and then cut from 1/8 inch hardboard using my rotary tool and abrasive cutoff wheel. The fins were then epoxied at the root and short leading edge to the motor mount tube and into the slots in the forward centering ring, and held rigidly aligned by the jig until the epoxy set. The fins were then masked at what would be the ID of the airframe tube, and reinforced with 6oz glass fin-fin across the motor mount tube between each fin pair, further reinforced with strips of 1 inch glass "boat tape" at each fin root joint.
The airframe tubing section was carefully marked for fin slots, which were then cut using my rotary tool with abrasive cutoff wheel. Epoxy was applied ahead of the center two rings as the frame was slid into place, and the frame left standing upright until the epoxy set to hopefully form ring-fin fillets on those two rings. The interior fin to airframe joints were reinforced one fin at a time using West Systems epoxy will milled glass as a filler. A long 3/8" dowel was used to place and smooth these interior filets. The aft centering ring was installed by pouring West Systems epoxy in the three fin-fin gaps, placing the ring, then standing the airframe up to allow the epoxy to flow over the forward surface of the ring and into the gaps between it, the motor mount, and the airframe tubing. After it set, the booster was placed nose-down, the airframe gaps behind the fins were taped, and more epoxy was applied to seal the aft of the ring to the tubes. Before this epoxy set, JB Weld was used to glue the tail cone retainer in place on the MMT.
The exterior fin to airframe joints were filleted using 5-minute epoxy thickened with baby powder and smoothed with the tip of a plastic spoon, which I learned about building the Vertical Assault kit. Gives great results, and allowed all 6 joints to be done in one session. The space above the top surface of the forward centering ring and between the motor mount and zipperless-design coupler tubing was filled with epoxy and milled glass. Minor gaps in the airframe behind each fin were filled with epoxy clay.
The avionics bay contains the two commercial altimeters used to record information about the flight and deploy the drogue and main recovery systems. It is constructed of a piece of Giant Leap 98mm coupler tubing reinforced with an interior wrap of vacuum-bagged carbon fiber, and a 2 inch length of Giant Leap 98mm DynaWind airframe tubing.
The bulkheads are custom-milled from 3/8 inch birch plywood milled so that about 3/16" fits inside the coupler and the remainder seals the end of the coupler and just fits inside the airframe. Each bulkhead has a u-bolt for attaching the recovery harnesses, and dual CPVC end caps as ejection charge holders with screw terminal blocks from Missile Works to attach the igniters. Two lengths of 1/4 inch all-thread with nuts and washers tie the bulkheads together, with wing-nuts used on one end to allow for easy disassembly.
A sled was fabricated to hold the altimeters and batteries. It consists of 1/8 inch birch ply laminated with 6oz fiberglass on each side, epoxied to cardboard tubes taken from the packaging for Aerotech igniters that slide over the all-thread, further reinforced with nylon ties at each end. The tubes are staggered one on either side so that the sled goes right up the center of the airframe tubing.
Two "centering rings" containing three each 6-32 threaded inserts are epoxied inside the bay to provide hard points for attaching the airframe tubes for the drogue and main recovery bays. The inside diameter of these rings is notched for the avionics sled, and thus these rings also provide physical support for the sled.
Three rotary switches from Missile Works are installed through the short airframe tubing section, drilled such that they end up essentially flush with the outside of the airframe, clamp the coupler tubing, and project inside the bay. Two are wired as SPST switches for power to the two altimeters, the third is wired as a DPST switch that open-circuits the igniters for the required "safe/arm" function called for in the NAR L3 certification requirements.
The wiring of the avionics bay is documented in the attached schematic diagram. Connectors were used to allow each bulkhead and the switches in the housing to be quickly detached from the sled. The connectors are 9-pin D shells for the switch wiring, and 4-pin Molex connectors like those used on older PC hard drive power cables for the bulkheads. To allow use of a single switch pole for the safe/arm function for each altimeter, the two igniters attached to each altimeter are safed by interrupting the common return lines as shown in the schematic.
Sizing the static port for the avionics bay was done by applying the formulas suggested by PerfectFlite and Missile Works for their respective altimeter products, then comparing the results with each other and with information found on the web. I've personally had better luck with single ports than with multiple holes, perhaps because I've been working with relatively small rockets. Regardless, I'm sticking with what I know and will use a single static port hole here.
The measured dimensions of the avionics bay as constructed are 95mm ID and approximately 250mm between bulkheads. This works out to 108.73 cubic inches before accounting for the volume of the sled, electronics, and wiring and other components inside the bay. By the PerfectFlight formula, the static port should be 0.221 inches in diameter. By the Missile Works formula for a bay over 100 cubic inches the answer is 0.261 inches. The closest standard drill size, which happens to split the difference, is 0.250 inches. Easy enough!
The construction of the payload bay is very similar to the avionics bay, except that there is a hard-epoxied rear bulkhead, and only one screw ring to hard-mount the nose cone. The forward end of the payload bay is open to the open interior volume of the nose cone in anticipation of extending downlink antennas above the carbon fiber reinforcement in the coupler and into the nose cone, since carbon fiber is opaque to RF.
Pre-sewn 1/4 inch tubular kevlar harness sections were purchased from Giant Leap, along with a small kevlar deployment bag and two kevlar chute protectors.
For an apogee drogue, I plan to fly a Public Missiles 4 x 144 inch nylon streamer. It will be protected with one of the kevlar blankets and attached to one of the kevlar harness sections holding the booster to the avionics bay.
The main parachute will be sewn from 1.9 oz rip-stop nylon purchased from the Mill Outlet Fabric Shop in Colorado Springs. Using the spreadsheet from Team Vatsaas I calculate that we want an 8 foot chute to keep the airframe less nose cone and payload bay below 20 feet per second at touch-down.
To extract the main chute and recover the nose cone and payload bay, a 3 foot parachute from BSD Rocketry will be packed in a kevlar blanket ahead of the main chute deployment bag, attached by kevlar harness to the nose cone and payload bay assembly, and to the top of the deployment bag. This assembly will recover separately from the rest of the rocket.
The altimeters are programmed such that the MAWD fires its drogue charge at apogee and its main charge at 1100 feet. The miniRRC2 is programmed to fire its drogue charge two seconds past apogee, and its main charge at 900 feet. Thus the MAWD is primary and the miniRRC2 is the backup. Since the M1297W has a burn time of about 5 seconds, mach inhibit is programmed on both altimeters to 8 seconds.
Table of Contents
This rocket uses dual deployment.
The apogee event separates the airframe between the zipperless-design booster section and the drogue bay. These two sections are linked by a Giant Leap 20 foot pre-sewn 1/4 inch tubular kevlar assembly, attached to which is a Public Missiles 4 x 144 inch red nylon streamer packed in a Giant Leap kevlar chute protection pad.
The main event separates the airframe between the forward payload bay and the main bay. Attached to the nose cone and payload bay assembly is a Giant Leap 15 foot pre-sewn 1/4 inch tubular kevlar assembly, attached "free bag" style to the top of a Giant Leap deployment bag containing the main chute. A 36 inch BSD Rocketry nylon parachute packed in a Giant Leap kevlar chute protection pad serves to pull the deployment bag off the main chute, after which it allows for safe recovery of the nose cone and payload assembly at just under 20 feet per second.
The 8 foot main chute is home-made from 1.9 oz rip-stop nylon using the design documented by Team Vatsaas. It is attached to the remainder of the rocket using another Giant Leap pre-sewn 1/4 inch tubular kevlar assembly.
The anchor points are all 5/16 inch u-bolts, except for on the booster which is equipped with an embedded loop of 3/16 inch stainless aircraft cable. All connections are made with suitable quick-links.
The LOC-style avionics bay between the main and drogue bays is populated with two commercial altimeters, a PerfectFlite MAWD and a Missile Works miniRRC2. Each is powered by a dedicated 9V battery, and has a dedicated on/off power switch mounted for access from outside the rocket. Additionally, a single safe/arm switch with two poles is used to interrupt the return circuits from the igniters to each altimeter. See the attached schematic of the avionics bay contents for more details.
The bulkheads at each end of the avionics bay have two CPVC end caps for ejection charge holders, and two-terminal screw blocks for attachment of electric matches purchase from Giant Leap used to ignite Goex 4F black powder ejection charges. Each charge holder and terminal block pair is labelled as to main or backup since the charges will be different for each.
The Info Central Black Powder Sizing page is the most authoritative site I've found on this topic. Each of the main and drogue bay interfaces will use 2 2-56 nylon screws as shear pins, each of which needs 35 pounds of force or so to shear. Designing for 15psi puts us between 150 and 200 pounds total force in a 4 inch airframe. The formula is thus 0.006 grams times diameter squared in inches times length in inches.
My drogue bay is 3.9 inches ID and 8 inches long, or 95.52 cubic inches. That works out to about 0.73 grams. However, there will be some volume in the motor mount tube above the motor that also must be accounted for, enough to nearly double the total volume when flying on the M1297W certification motor. Also, since this charge must fire reliably at 15-18k feet above ground level of around 5k feet, such that combustion is likely to be incomplete, we need to add some margin.
My main bay is 3.9 inches ID and about 25 inches between bulkheads, or about 298.50 cubic inches. That works out to 2.28 grams.
Sanity checking, PerfectFlite recommends that a 4F black powder charge be sized by multiplying the volume of the bay in cubic inches by 0.01 grams. That yields about 1.8 grams for the drogue bay and 3 grams for the main bay.
That suggested to me that a good starting point for ground testing is 1.5 grams for the drogue bay and 2.5 grams for the main bay. Ground tests were done using the PC interface cable for the MAWD routed in through the static test port to manually trigger ejections. Testing of the apogee bay showed that 1.5 grams was sufficient for deployment and 1.8 grams was more authoritative. A single test of main deploy with 2.5 grams gave a nearly perfect result. Given the altitude of our expected apogee, we should be generous with the apogee charge, perhaps using 2.0 grams for the primary. The main will deploy at an altitude below where the tests were performed, so no adjustment in charge size should be required.
Descent rate of the nose cone and payload bay which mass just under 1kg will be less than 20 feet per second with a 36 inch chute based on manufacturer recommendations and Rocksim v8 simulation. Descent rate of the remainder of the rocket under the 8 foot chute should be about 18 feet per second by the spreadsheet provided by the designers of this chute pattern, sanity checked using the descent rate tables of similar commercial parachute designs, like those from The Rocketman.
Simulation using Rocksim v8 with a variety of motors showed that the rocket is unconditionally stable with all motors likely to be flown. The worst-case stability among 75mm motors is actually with the M1297W chosen for the certification flight, at margin 1.05. This is because the front of this motor falls almost exactly at the CP. Using a longer motor like the M1850W raises the initial stability margin to 1.10 because the front fuel grain is ahead of the CP, and lesser motors also increase the stability because less mass is behind the CP. The smallest motor I can conceive of flying in this rocket (a Cesaroni J285) would leave us overstable with margin 3.79 on the way to about 1800 feet apogee.
On the certification flight, using an Aerotech M1297W reload and associated hardware, the anticipated apogee is round 14,700 feet. This is just under 75% of the NCR North Site standing waiver of 20,000 feet.
The highest altitude simulated would be achieved with an Aerotech M1850W reload at nearly 18,000 feet. The lowest altitude simulated is with a Cesaroni J285 and Slimline adapters to just over 1800 feet.
add description of anticipated flight profile here, including launch weight, estimated drag coefficient, velocity leaving the rail, max expected velocity, altitude, and acceleration
-
Planning
- Pick a club launch with suitable waiver and facilities to support flight.
- Confirm L3CC member(s) available to attend selected launch.
- Confirm that required loaner motor hardware will be available at launch.
- Notify launch sponsor (club president) of intended flight.
- Notify interested friends of intended flight.
- Perform final pre-flight simulation with as-built masses, etc.
-
Gather consummables and tools required to support flight
- fresh 9V batteries
- black powder
- e-matches
- motor retainer snap rings
- small nylon wire ties
- cellulose wadding material
- masking tape
- screwdriver for phillips-head airframe screws
- small straight-blade screwdriver for power switches
- motor reload kit
- high temperature grease
- long small diameter dowels for igniter insertion
-
Before Leaving Home
-
program altimeters for suitable mach delay and recovery deployment
-
MAWD
- 8 seconds mach delay
- 1500 foot main deploy
-
miniRRC2
- 8 seconds mach delay
- 1000 foot main deploy
- 2 seconds apogee delay
- no main delay
- dual deploy
- ops mode 16 (default)
-
MAWD
- assemble all recovery system components and ensure everything fits
- confirm wiring and operation of altimeter power and safe/arm switches
- Ground test recovery system to confirm suitable black powder charge sizing
-
program altimeters for suitable mach delay and recovery deployment
-
Pre-Flight
- confirm payload batteries in good condition, bay loaded, power switch works
- confirm reception of signals from transmitter(s) in payload bay
- install fresh 9V batteries for altimeters on avionics bay sled
- inspect altimeters and associated avionics bay wiring for visible faults
- close up avionics bay
- install e-matches, confirming resistance of 1-2 ohms and fit in charge cups
- power up altimeters, operate safe/arm switch, and confirm e-match continuity
-
load BP charges into charge cups
- Drogue Primary Charge - 2.0 grams 4F BP
- Drogue Backup Charge - 2.5 grams 4F BP
- Main Primary Charge - 2.5 grams 4F BP
- Main Backup Charge - 3.0 grams 4F BP
- connect recovery harnesses and install recovery bay airframe sections
- power up altimeters, operate safe/arm switch, and confirm e-match continuity
- safe and power-down the altimeters
- load main recovery bay, attaching nosecone and payload bay assembly
- install nylon 2-56 screws as shear pins between main bay and payload bay
- load drogue recovery bay, feeding harness end through fin can motor tube
- install nylon 2-56 screws as shear pins between drogue bay and fin can
- load motor per manufacturer instructions
- attach forged eye-bolt to forward closure if not already present
- attach drogue harness to eye-bolt on forward motor closure
- install motor in motor mount
- install motor retention snap rings
- prepare igniter for later installation by attaching to long 1/8" dowel
- confirm all screws in place, avionics off and safe
- fill out a launch card
- notify RSO/LCO of readiness for inspection and launch, obtain a rail assignment and permission to move rocket to launch pad for final prep
- coordinate readiness with support team members, photographers, observers
-
Final Prep
- move rocket to launch area
- clean and lubricate launch rail if necessary
- power up payload and confirm reception of signals from transmitter(s)
- mount rocket on launch rail, rotate to vertical
- power up primary altimeter, confirm expected beep pattern
- power up backup altimeter, confirm expected beep pattern
- arm ejection charges
- confirm altimeters both giving expected beep patterns for igniter continuity
- install igniter and connect to launch control system
- capture GPS waypoint for rail location
- smile for the cameras, make sure we have enough "foil Murphy!" shots taken
- retreat to safe area behind LCO
- confirm continued reception of transmitter signal(s) from payload bay
- confirm photographers and observers are ready and know what to expect
- make sure binoculars and backpack with water and recovery tools are at hand
- tell RSO and LCO we're ready to launch
- try to relax and enjoy watching the flight!
-
Recovery
- track rocket to landing site
- capture GPS waypoint of landing site, take lots of photos
- note any damage
- gather up and roughly re-pack recovery system for return to flight line
- bring the rocket to observers for post-flight inspection
YikStik was flown on an M1297W on Saturday morning at NCR's Oktoberfest 2008. The boost was beautiful. Unfortunately, we lost visual as the rocket climbed into high clouds near apogee. Radio tracking signals remained strong for several minutes, then disappeared. We were confused by viewing what we thought was YikStik descending before signals were lost in about the right direction, but now believe we were actually watching a previously launched rocket and did not see YikStik descend. This confusion prevented location of any of the rocket until Sunday evening, after I had left the launch area.
After an extensive search, the nose cone assembly was finally found with the Walston tracking gear nearly 3.5 miles down range. The remainder of the rocket has not been found despite extensive searching on the ground and from the air.
Reward if returned posters were placed in the area during the week following the launch but have elicited no useful reponses yet.
Consideration of how the nose cone ended up where it did suggests we may have had an apogee deployment of the main, perhaps due to stress on the shear pins before launch, during boost, or during apogee drogue deployment causing them to break early.
It is unfortunate that we were confused by seeing another rocket descending about the expected amount of time after YikStik's launch in approximately the right direction. This caused us to believe that the rocket was much closer than the nose cone turned out to be, causing us to waste a lot of time searching in an area too close to the launch site. It also caused us to assume something really weird had happened to the transmitters, such that the tracking signal was suddenly lost long after the rocket was on the ground, instead of what seems to really have happened, which is that the rocket was farther away descending after a main deployment at apogee, and the loss of signal was simply due to dropping below a ridge line a couple miles from the launch site. I can't help but think that if we'd been looking in the right area sooner after the launch that we might have found the rocket before someone else apparently picked it up.
I regret the decision to use a "free bag" configuration of the deployment bag. Since both tracking transmitters were in the payload bay behind the nose cone, and we were eventually able to recover that portion of the rocket, it is possible that if the deployment bag were tethered to the main that we might have recovered the remainder of the rocket.
If the rocket is recovered and able to fly again, the two changes I would like to make are to tether the deployment bag to the apex of the main, and to move from 2-56 nylon screws to 4-40 nylon screws for the main deployment shear pins, ensuring the holes through the airframe are a loose enough fit to avoid stresses on the pins during boost. I have no way to know what happened for sure, but believe this might solve the assumed problem of main deployment at apogee.
All in all, the design and build process was educational, and a lot of fun! I'm looking forward to fabricating more custom parts using carbon fiber and vacuum bagging in the future. The beautiful boost and obvious survival of the rocket airframe through the expected mach transitions confirms my design and construction skills are adequate to attain an L3 cert. While I hope to recover the remainder of YikStik someday, I won't waste any time before trying again with a new airframe!
[update] We have learned that one of the altimeters used in this flight, the Missile Works miniRRC2, was subject to a fault in firmware that could cause premature ejection of the main in flights above 10k feet. Thus, it now seems even more likely that we sustained an apogee ejection of the main, but that it may well have been through no fault of the rocket's design, construction, or preparation. Frustrating!